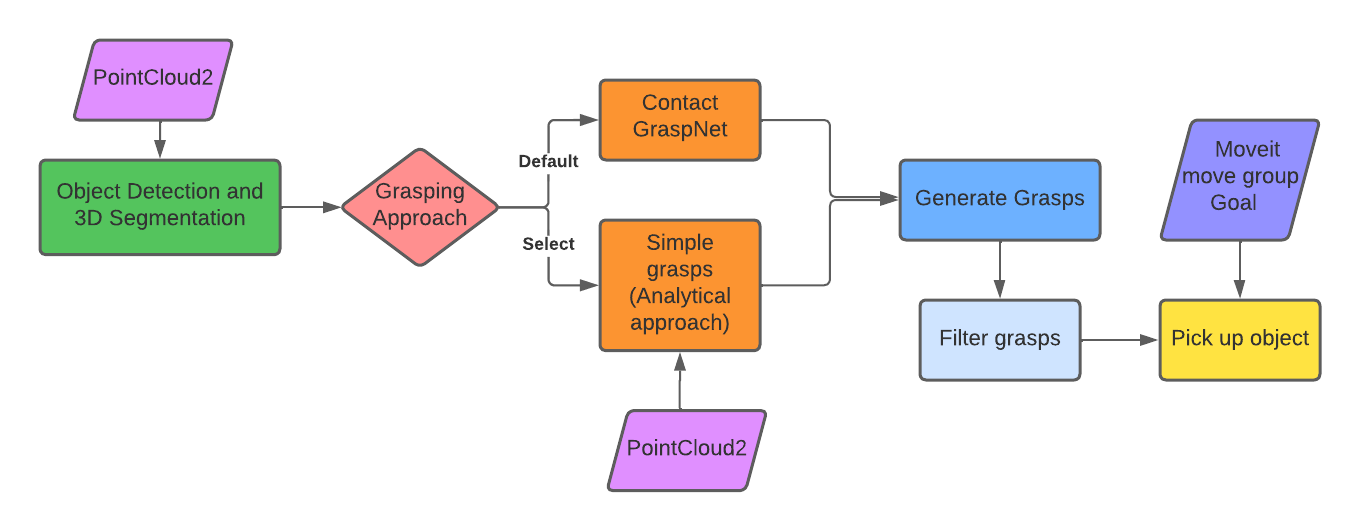
Three ROS packages have been developed to implement two different solutions to grasping:
-
contact_graspnet - ROS Wrapper of Contact-Graspnet with modifications made to switch from a Panda gripper to the TIAGo gripper. This method uses a learning based approach.
-
geometric_grasp - A ROS package with an analytical approach to grasping.
-
pick_up_object - State machine that allows for the execution of both grasping methods.
Kinetic docker container.
Melodic docker container with TensorFlow and Nvidia support. Refer to tiago_docker_tensorflow.
1. Choose what launch file to launch depending on what method you would like to test:
`roslaunch contact_graspnet contact_graspnet.launch`
`roslaunch geometric_grasp geometric_grasp.launch`
2. roslaunch pick_up_object pick_up_object.launch
3. In order to switch the different methods of grasping, it must be addressed in the generate_grasps state.
Overview of the full pipeline to grasp an object.