INIT_STATE Error #3
Comments
|
Hi, I don't have a BH280 to test if this is a problem with this version, but I'm going to ask. |
|
There are a few reasons why the CAN bus would change from READY to FAILURE:
|
|
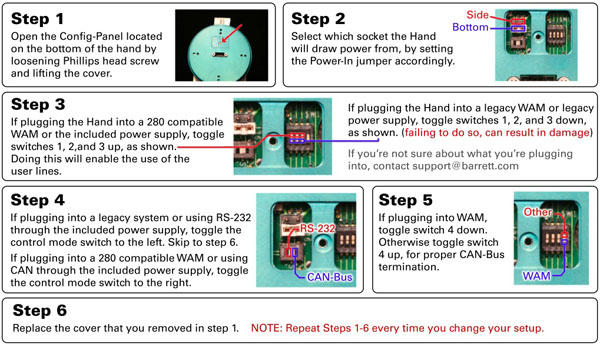
I tried the steps suggested for terminating the CAN bus and I also reduced the frequency to 100 but still facing the same problem, The BHand power supply and the BHand setup images are attached |



{kind=link}
|
to add to Randa's comments: It would be great if you can fix this issue so we can use your official package. |
Hi
I have the same problem occured in this closed issue :
#1
Initialization fails, following the proposed suggestions written in the closed issue above helped in changing the state into ready state, but it can't move or read the sensors.
I am using BH280 + ubuntu 12.04 + peak-linux-7.13 (NET=NO_NETDEV_SUPPORT RT=NO_RT) and I tried different frequencies down to 50 and still facing the same problem.
The text was updated successfully, but these errors were encountered: